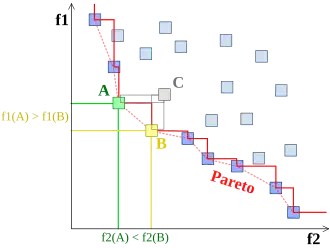
To find the best Mario Kart 8 build, use the Pareto front to eliminate dominated options and focus on the efficient drivers that balance speed and acceleration. This objective criteria helps filter out suboptimal choices, but you still need to make a final decision based on your play style and preferences.